 搜索
搜索


- FastUMI已在多项前沿研究中被验证为多任务机器人学习的关键数据来源,凸显了真实世界操作轨迹在训练泛化性强、鲁棒性高的机器人策略中的不可替代价值
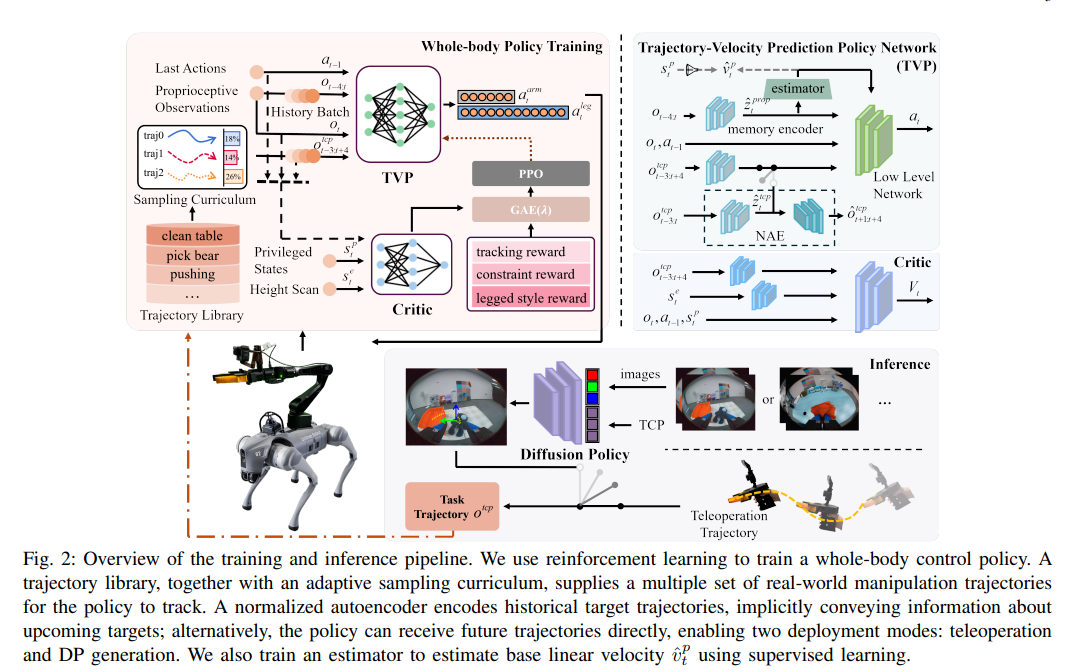
近日,来自上海交通大学与上海人工智能实验室的研究团队发布最新研究成果《MLM:Learning Multi-task Loco-Manipulation》。该研究实现了四足机器人搭载机械臂在真实世界中以单一策略完成多任务“移动+操作”的全身协作控制,并可与扩散大模型结合实现自主操作。在这一突破背后,FastUMI提供的真实世界多任务轨迹数据发挥了关键作用。
MLM框架:
统一策略实现移动与操作协同
MLM是一种基于真实轨迹数据与大规模仿真训练的全身强化学习控制框架。该框架使搭载机械臂的四足机器人能够在不进行额外真实机器人训练的情况下,通过统一策略同步完成移动与精细操作,并胜任多种家庭场景任务,如清洁桌面、倾倒饮料、开启容器、抓取杯子、拔插充电器等。
研究团队从FastUMI系统中提取了超过1200条高质量、多场景的真实操作轨迹,涵盖多种典型任务,为MLM的训练提供了关键数据支持。这些轨迹具备硬件无关、端到端可用的特性,有效支撑了仿真环境中的多任务策略学习,大幅降低了真实机器人训练的依赖与成本。

为什么是FastUMI?
真实世界轨迹的价值正在被证明
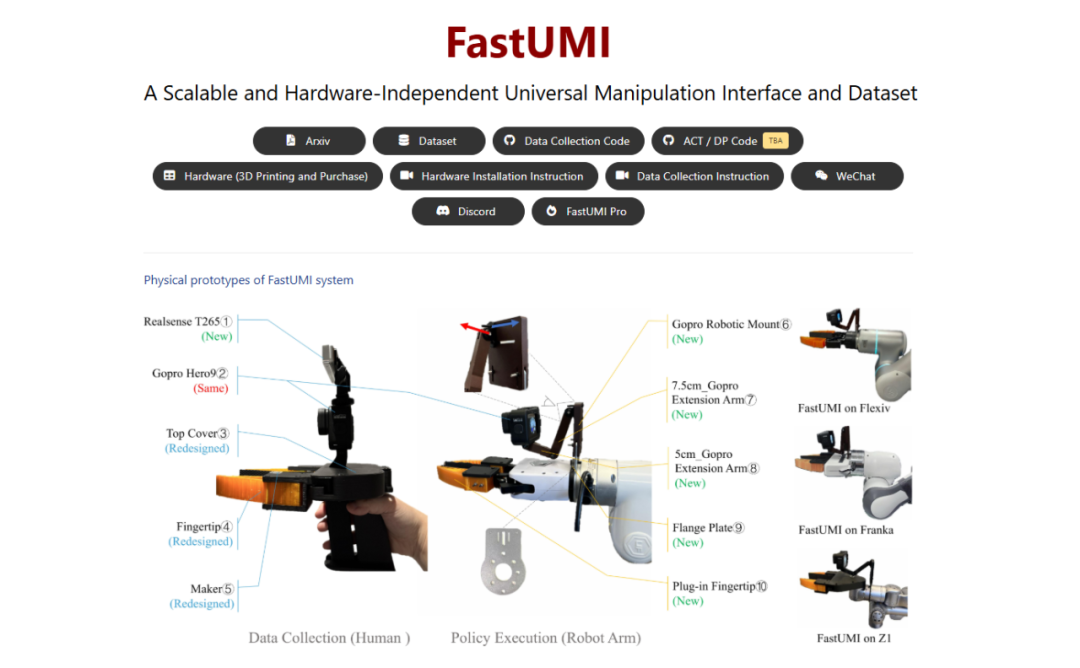
作为通用操作接口(UMI)的升级方案,FastUMI以“低成本、高适配、易部署”为核心优势,为机器人真机数据采集提供了高效解决方案。该技术通过硬件解耦设计,降低对特定机器人硬件的依赖,在保证视觉一致性的同时简化系统集成流程,在典型操作任务中可实现毫米级精度,采集效率较传统手段显著提升。
FastUMI已在多项前沿研究中被验证为多任务机器人学习的关键数据来源,凸显了真实世界操作轨迹在训练泛化性强、鲁棒性高的机器人策略中的不可替代价值。
鹿明机器人推出FastUMI Pro:
打造高效无本体数据采集系统
基于FastUMI技术积累,鹿明机器人正式推出FastUMI Pro多模态无本体数据采集软硬件系统。该系统采用“无机器人本体”的轻量化手持式夹爪方案,整体重量仅600g,负载能力达2kg,在便携性、稳定性和连续作业能力上表现优异,支持在各类场景中灵活、高效地完成数据采集。

FastUMI Pro显著降低了数据采集的系统复杂度与综合成本,将采集效率提升至传统方案的3倍,成本压缩至1/5。该系统每采集一条数据即具备高可用性,真正实现了“高质量数据易得”的目标,为机器人学习研究及产业应用提供了可靠的数据基础。关键词:机器人新闻

目前,鹿明机器人已依托FastUMI技术完成超过1万小时的高质量真实操作数据积累,并开展了基座模型训练。公司将持续聚焦数据采集硬件、软件平台与模型优化,构建覆盖数据生成、处理与应用的完整技术链条,致力于推动开放、高效的具身智能数据生态建设。(此文出自见道官网:www.seetao.com未经允许不得转载否则必究,转载请注明见道网+原文链接)见道网工程栏目编辑/边文君
评论



 赞
赞
 收藏
收藏
 评论
评论

 分享
分享




写点什么吧~